Purpose
To describe the python tool we have designed as the base of our further experimentation and to explain the archictecture of the program. The source code can be found in our repository and easily cloned. As this software has been developed to run on a linux pc, no attempts has been made to make it work on windows, this should not be too hard though.
Description
On a higher level of abstraction our tool consist of three distict parts: Data retrieval, data display and drone control. For performance reasons the data retrieval is split into separate processes. The entry point for the program is drone.py, here retrieval, display and control is initialised and their processes and threads started. We are also able to start a testdevice if a real physical drone is not present. The test device is a simple server which transmits data packets like a real drone, the packets transmitted are real packets which we have captured during a drone flight, so this feature actually makes it possible to review a previous flight.
The data retrieval processes continously receives video, wifi and nav data from the drone or from the test device. We have implemented a base Receiver class and subclassed this base for each of the data types received. The classes use the python multiprocess library and defines an interface for external use of the data received. Each class spawn a new process for the retrieval loop, the received data is shared via multiprocess manager objects.
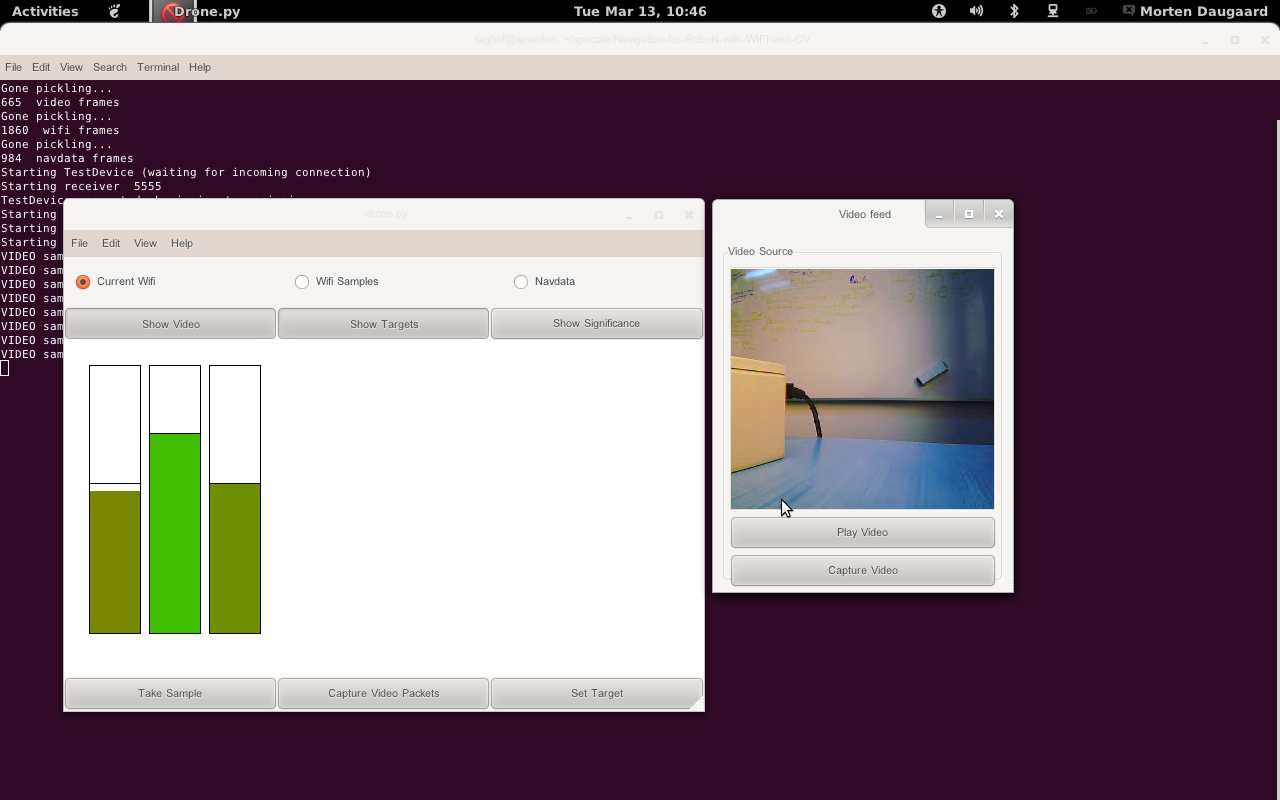
We display the decoded data to the user via a pyGTK user interface. It basically consist of some radiobuttons
to select the type of data to view and some togglebuttons to add special layers on top of the data. The data
itself is drawn to a standard pyGTK drawing area. Below the drawing area we have added buttons to control
the recording functions of the receiver classes.

The third part of the system deals with controlling the drone. The drone is controlled by sending AT commands to the drone command port, we have isolated these commands in a controller interface and all commands to drone is sent through this interface. Like in the receiver case we have implemented a base controller class and from this base we subclass the actual controllers. At this point we have two controllers, one for manual control via an Xbox360 joypad and one for automatic control. The automatic control loop at this point is empty, but will see development in the near future. Our controller arrangement is easily extendable if the need for additional controllers arise.
We provide documentation (though lacking in completeness) in the form of an Epydoc API with class diagrams and the like.
Results
The program has reached a development stage where it can be used to control and monitor our drone experiments, it is not though a finished product, we expect the program to be developed further in the course of the project.